
First of all, even though I've been relatively pleased with the Kelly KBS36101 controllers on tinyKart, they are frustrating to work with. With the external Hall effect sensors perfectly positioned, the performance at 80A per motor is spectacular. But, if the sensors go out of timing even by just a little bit, the controllers cut out and you lose power to one or both sides. Also, they won't work at all at full current (100A) and they have issues at full speed. (The baseline KBS is only rated to 40,000erpm, which is about 75% of this motor's top speed.) Recently, with the changeover to SK3 motors, the controller bugs have just gotten buggier. So...
 |
| I pulled out its heart... |
 |
| ...and put it in a box. |
If I'm gonna deal with buggy controllers, they might as well be my buggy controllers. DirectDrive was pretty much designed for tinyKart. If I were as hardcore as I was back in 2008 when we built Cap Kart, I would have put it on from the start. But I guess building the entire chassis was enough of a challenge and we did get quite a lot of use out of the Kelly controllers. Still, screw it, time for the complete power system overhaul.

DirectDrive has yet to be tested under any real load, so by committing it to a vehicle, I am forced to solve any to-be-revealed bugs. I guess that means I should also buy more DirectFETs and solder paste, since things rarely go well on the first version of a motor controller. I've only built one so far, but I have enough parts for a second. The payoff will be:
- More power. DirectDrive is sized for 200A peak at 48V. In this application, assuming it doesn't just outright blow up (it will), it should have no trouble pushing 100A peak at 40V.
- Sinusoidal field-oriented control. I'm not sure this is directly advantageous on such high-speed, low-inductance motors. But the side effect of having complete control of motor timing in software is worth it. No more screwing around with sensor positioning.
- Wireless data. I can get vehicle performance data off these controllers, and use the data to help debug failures. (As opposed to the Kelly controllers, where *** ** is the universal indicator for every possible failure...)
- Wireless throttle? It worked for Cap Kart.
- Shedding weight. DirectDrive is a tiny bit lighter than the KBS.
For all that, the only cost is probably dozens of hours of troubleshooting...
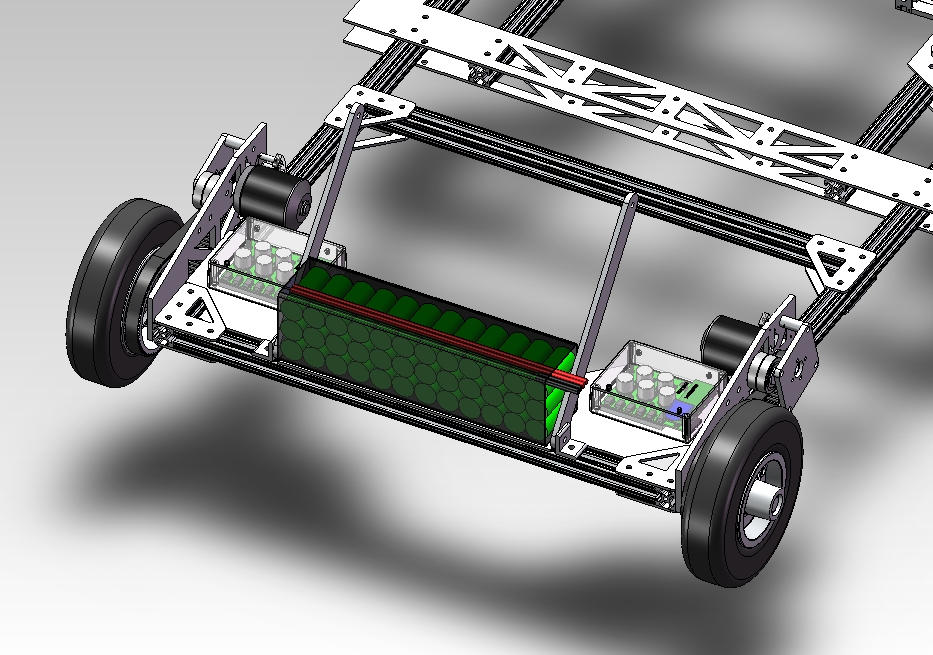
You might also notice the new battery pack. I'm tired of worrying about LiPos and am willing to take a ~20% energy capacity cut for the peace-of-mind that comes with A123 LiFePO4 cells. But in order to match the power density of the LiPos, they will have to be m1-B cells. (The green ones, not the paper ones from that DeWalt Drill tree I found.) These have a lower internal resistance, such that a 6lb, 12S3P pack can put out bursts of 6-8kW.
But yeah, messing with tinyKart's Hall effect sensors has reminded me just how much of a pain in the ass it is. It would be really, really nice to never have to play the phase-and-sensor-musical-chairs-wiring-game ever again. I am still very convinced that vehicle-grade sensorless control is a possibility. In fact, we recently found proof:

That is a $28 shady eBay eBike controller, similar to the ones that bailed me out in Singapore. Except, it's sensorless. And the start-up doesn't suck. Unlike RC plane controllers, it ramps the output frequency and voltage gradually at start-up so that you get a smooth acceleration. It also does current (torque) control in both start-up and running modes. It's quite nice on Pneu Scooter and RazEr Revolution. But it's still dumb square wave drive, and it simply refuses to start ultra-low-resistance outrunners. However, it's proof that a smooth ramping start-up is achievable.
So, that will be my first task on the way to full sensorless field-oriented control. Start-up is regarded as the hard part of sensorless control, but for some reason I think it's easy. I will be aiming for a sinusoidal drive current with a ramping amplitude and frequency determined by some estimate of the system inertia. It may need locked-rotor detection or a way to reset and try again if it fails to achieve commutation. But I think it will be pretty easy, actually, compared to the rest of the project:
Once the speed is high enough (10%?), the fun begins. Unlike the $28 version, I will be going for full sinusoidal field-oriented control, with no direct measurement of back EMF. I'm sure this will keep me occupied in software for quite a while. It is my first big software project in a long time...and sadly I'm kind-of excited for it. So much so that I violated one of my long-standing software principles:
 |
| I split my build into multiple files. :/ |
I'll be implementing sensorless field-oriented control first on the 3ph 3.1, Pneu Scooter's controller. It's been totally fine ever since I replaced the FETs that died in Singapore. I'm still not 100% sure what the cause of that failure was, but since I've never seen it before or since, I will assume it was something specific (like bad sensor timing....) or just high ambient temperature and humidity. Once sensorless Pneu Scooter is up and running, I can think about porting it over to DirectDrive.
Let the season of motor controllers begin...














































{kind=link}
{kind=link}
{kind=link}
{kind=link}