
Electric go-kart are by far my favorite from of small EV, since they can really take advantage of the power-to-weight ratio of their electrical components without the need for a huge amount of energy storage. I've built or helped build three electric karts (so far), with a range of different designs. Some of the karts have also gone through a couple iterations to keep up with the latest generations of power system components.
Karts:
Electric Go-Kart Links:
TinyCross:
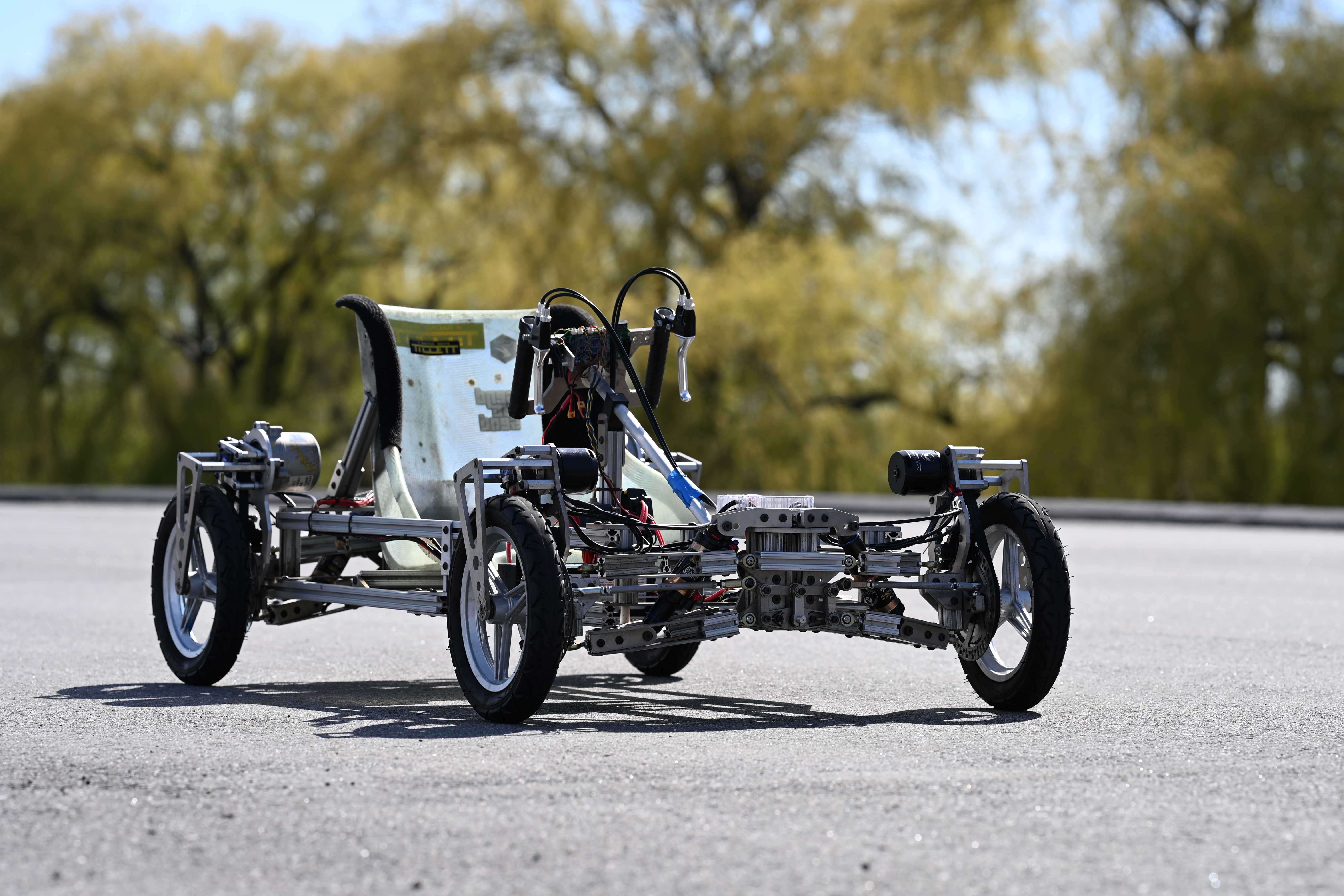 |
| TinyCross, an ultralight electric crosskart. Photo Credit: @fangzhyu |
Status: Active
Specifications:
Weight: ≈100lbs (46.5kg)
Top Speed: ≈40mph
Peak Power: ≈10kW
Drivetrain: Independent 4WD Belt Drive
Suspension: 4x DNM AOY-36RC 190mm Air Shocks
Front Motors: 2x Alien Power System 6374HEV-170
Rear Motors: 2x Hyundai 56300F2200 Electric Power Steering Motors
Rear Motors: 2x Hyundai 56300F2200 Electric Power Steering Motors
Battery: 2S2P Tattu Plus 10Ah / 22.2V Smart Battery Pack
For my third electric go-kart project, I wanted to build something about halfway between Cap Kart and tinyKart, in terms of size and weight. The objective was to build something that could still be transported by one person and fit in a normal-sized car with minimal disassembly, but with a frame that could take a beating. I hadn't heard of crosskarts until I stumbled onto this video while looking for inspiration for the design. The idea for TinyCross was to make an ultralight electric version of a crosskart. (Imagine the karts in that video crossed with a downhill quad bike, and then electrified like tinyKart.)
For my third electric go-kart project, I wanted to build something about halfway between Cap Kart and tinyKart, in terms of size and weight. The objective was to build something that could still be transported by one person and fit in a normal-sized car with minimal disassembly, but with a frame that could take a beating. I hadn't heard of crosskarts until I stumbled onto this video while looking for inspiration for the design. The idea for TinyCross was to make an ultralight electric version of a crosskart. (Imagine the karts in that video crossed with a downhill quad bike, and then electrified like tinyKart.)
 |
| Front view, with independent suspension using mountain bike air shocks. |
For me, the defining characteristic of a crosskart is the suspension. I decided to try using mountain bike air shocks as a way to add suspension with as little extra weight as possible. They're not as linear as spring shocks, but the weight savings are huge. Also, since each wheel sees much less weight than a mountain bike rear tire, I need to be able to set the spring rate very low - lower than stock springs - so the adjustability of air shocks is ideal.
 |
| Each wheel's drive module is self-contained, so no mechanical power crosses the suspension. |
The powertrain is similar to tinyKart: one 63mm brushless motor belt drive per wheel. Except in this case, the motor rides along with the wheel as unsprung mass. The motors are light enough for this to be acceptable, especially given the benefit of not having to run mechanical power through the suspension and steering joints. All four wheels get a motor and a disk brake this time. The brake caliper packages nicely in the middle of the drive belt loop.
The project is an ongoing work-in-progress, but here's some video of it ice racing in 2026:
The project is an ongoing work-in-progress, but here's some video of it ice racing in 2026:
tinyKart:
 |
| tinyKart after 2013 rebuild. Railroad track is inactive. |
Status: Completed Summer 2011, re-built in Summer 2013
Specifications:
Weight: 54lbs (24kg)
Top Speed: 31mph
50m Time: 5.95s
Peak Power Input: 4.75kW
Peak Power Output: 4.15kW (5.5hp)
Drivetrain: Independent RWD Belt Drive
Motors: EMP C6374-200 (discontinued), Alien Power System 6374-170
Battery: A123 LiFePO4: 6.9Ah @ 39.6V
tinyKart was the fifth Edgerton Center Summer Engineering Workshop project, built during the summer of 2011. It's an ultralight kart - maybe the first of its kind although the class has been taken to extremes now. Cap Kart, as fun as it is, didn't get much use because it weighs over 200lbs, doesn't fit through doors, and has no ground clearance. tinyKart, on the other hand, weighs less than 55lbs and can be moved easily by one person.
 |
| tinyKart's ultralight aluminum chassis compared to Cap Kart. |
The first step in the weight savings was a completely custom aluminum chassis, made mostly from 1/8" plate and 80/20 t-slot extrusion. The plate and extrusions are bolted together; no welding required. The front and rear can be separated by a few t-slot screws. The chassis is more flexible than Cap Kart's, but strong enough to support the weight of an average-sized driver, up to 200lbs.
 |
| One of the independent rear wheel drive modules. |
The powertrain of tinyKart has been through several iterations. It currently consists of a custom 39.6V, 6.9Ah A123 LiFePO4 battery pack, two Kelly KBS48121 motor controllers, and two interchangeable EMP C6374-200 (discontinued) or Alien Power System 6374-170 brushless motors. The motors are fitted with external Hall effect sensors to provide a commutation signal to the Kelly controllers. The rear wheels are driven by timing belts.
Here's some video of it in action:
Cap Kart:
 |
| Cap Kart, the original. |
Status: v2.0 completed summer 2010.
Specifications:
Weight: ~200lbs
Top Speed: 35mph
Peak Power: 8kW
Drivetrain: 3.5:1 RWD Chain Drive w/ Custom Differential
Motor: D&D SepEx ES-101A-33 (Separately Excited DC)
Battery: Thundersky LiFePO4: 40Ah @ 39.6V
Capacitor: Maxwell Boostcap 110F @ 16V (19hp-sec)
Cap Kart is the second and largest vehicle created by the Edgerton Center Summer Engineering Workshop (2008 edition). It's an electric go-kart with battery and ultracapacitor-based energy storage. The batteries provide the bulk of the energy storage, while the ultracapacitor provides extra peak power capability during acceleration and braking. For 2010, the Summer Engineering Workshop is upgrading the Cap Kart to lithium-ion batteries, adding a rear differential, and improving the control electronics and software.
 |
| The pre-conversion Haase kart chassis. |
We began in 2008 with a Haase kart chassis, sans engine. It's wide, strong, and light. It also came with a huge brake rotor and dual master cylinder. Go kart like this use a live axle, i.e. the rear wheels are connected to a single hollow tube axle driven by a chain and sprocket. In a turn, one of the wheels slips, or even comes off the ground entirely. However, our kart has become much more back-heavy and the live axle was hurting its performance.
{kind=link}
 |
| Cap Kart v2.0's axial differential. Design and render credit: Max Hill. |
Stealing a page from the LOLrioKart, we added a custom-built axial differential in 2010 to help with low-speed turning. The design uses all spur gears to produce the same kinematics as a conventional open differential.
 |
| Thundersky LiFePO4 cells, also part of the v2.0 upgrade. |
 |
| Cap Kart's namesake, the 110F / 16V Maxwell Boostcap. |
The Cap Kart gets it name from the 110F, 16V Maxwell ultracapacitor which acts as a power boost for both acceleration and regenerative braking. When fully charged, the capacitor stores 14,000J of energy. That's only a small fraction (0.25%) of the total energy stored in the battery, but it's equivalent to the kinetic energy of the kart traveling at 28mph. Put another way, it can supply or absorb 19 horsepower-seconds of energy.
 |
| Cap Kart's separately-excited DC motor. |
The motor we chose for the kart is a 48V separately-excited DC motor from D&D Motor Systems. The ability to vary the strength of the magnetic field gives this type of motor an adjustable torque-speed curve. At low speeds, a strong field gives the motor the maximum amount of torque per Amp. At high speeds, the field is weakened to decrease the motor's back EMF and allow it to rotate faster at the same applied voltage. On our kart, the strength of the field can be controlled via a manual stick shift or an automatic "CVT mode." The motor weighs 53lbs and can produce as much as 13hp (10kW).
 |
| The novel series ultracapacitor boost circuit. |
All of the kart's power and signal electronics were custom-built in-house, since no commercially available motor controllers can work with the ultracapacitor boost module. The power circuit is an original design that places the ultracapacitor in series with the motor controller. Since the controller is being operated as a constant-current source, the amount of power sourced from or sunk to the battery is automatically adjusted downward in the presence of the extra capacitor voltage at the output.
For more information on how this works, and how it compares to other battery/ultracapacitor systems, see this summary, which we presented at the EVER '09 conference in Monaco.