
 |
| See the gap between the end cap and the rotor can? |
I didn't expect this motor to last very long considering the history of tinyKart with these motors. I even remarked in the very first tinyKart build post that they are not the most well-constructed motors. The interface length between the can and the end cap looks to be no more than 2mm. I don't remember if any of the other original SKs failed exactly this way or if their entire rotor assembly shifted axially, but the end result was the same: the rotor can grinds on the face plate.
By this time, though, I had three new motors from Alien Power System ready and waiting. I decided to only replace the broken SK, since the EMP 6374-200 with the custom shaft on the left side drive still seems to be holding up. The Alien Power System 6374-170 is similar to the SK in construction (no can bearing, no radial screws), but since Alien Power System specializes in electric long boards, I was counting on the motors being somewhat more suitable for EV duty.
One other consequence of being a purpose-built EV motor is that the shaft has a nice 3mm keyway for transmitting torque. (RC airplane motors typically transmit torque to a propeller through a hub mounted to the end cap of the rotor.) This means no milling/grinding set screw flats. In fact, no modification is required at all; the motors become drop-in replacements. Of course, now the pulley needs a matching keyway.

I picked up a 3mm keyway broach and 10mm bushing from McMaster for about $60. (It will probably come in handy for other projects as well, as long as I don't lose it like all my other keyway broaches.) The broaching force is low enough that it can be done on a small 1T arbor press. There was just enough material inside the pulley hub to give a full-depth keyway without cutting into the pulley itself, and the broach was able to make it through both hub sides with no problems.

The key interface length is only about 0.5in, but math doesn't lie so it should be able to handle the full torque. Installation was no problem:
 |
| Fits the new color scheme as well... |
The keyed motor shaft ends about halfway through the pulley, so I'm using a leftover piece of 10mm shaft to span from the other side of the pulley to the outside bearing plate (and a bit further, since I'm too lazy to cut it.) This might offer more radial offset tolerance than the single machined long-shaft with three bearings (two in the motor and one on the outer bearing plate).
The sensor timing was easy, which means there's plenty of magnetic flux available outside the rotor can. (I wonder how much more torque per amp you could get with a steel flux jacket around the entire rotor...) The no-load current seems very good (lack of a large can bearing helps here) and the motor sounds good. There's definitely can resonance, but it's not as sharp of a hollow ringing resonance sound as the SK. So that might bode well for the structural integrity of the rotor at high speeds.
Time for test driving:
Ryan, Dave, and I are apparently too careful to be good test drivers, so I've taken to handing it off to other coworkers (Zack and other-Ryann) who are less emotionally attached to the machine. Other-Ryann, who did the hot lap, is also an experienced racing kart driver, so that helps. Other-Ryann's test laps were done on the following settings:
Left Side EMP 6374-200:
Current Limit: 75% (90A, 4.3Nm, 43lbf)
Voltage Limit: 80% (31.7V, 6340rpm, 33.5mph)
Right Side APS 6374-170:
Current Limit: 65% (78A, 4.4Nm, 44lbf)
Voltage Limit: 93% (36.8V, 6260rpm, 33.1mph)
Lacking any telemetry (one thing I do miss from Cap Kart), I don't know how often, if at all, the limits were hit. But after three or four laps at nearly full speed, things still came back relatively cool. Borrowed the FLIR camera from work to see how cool:
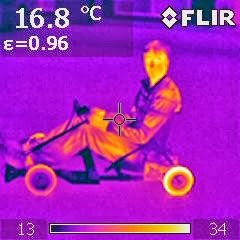
You can see why Formula 1 loves thermal imaging cameras now...

Turns out you can rent them at Home Depot as well for about $50, too. And of course if you just need spot measurements, IR temp guns are dirt cheap. (There must be a way to turn one of these into a crude imager with some optics, right?)

It's not surprising, given the way tinyKart drives, that the rear tires came back hottest, about 30ºC above ambient. You can see the Alien Power System motor stayed relatively cool, only about 20ºC above ambient. (Although the stator is where most of the heat is generated, so looking at the rotor only gives a lagging indication of motor temperature.) The belt was only a bit warm as well. The Kelly controller barely seemed to notice that it was being used.
Since it survived other-Ryann's thrashing, I turned up the current on both sides for the next day of testing (backwardly, the first part of the video, with Dave and Zack driving and a shoe cameo by me):
Since it survived other-Ryann's thrashing, I turned up the current on both sides for the next day of testing (backwardly, the first part of the video, with Dave and Zack driving and a shoe cameo by me):
Left Side EMP 6374-200:
Current Limit: 85% (102A, 4.9Nm, 48lbf)
Voltage Limit: 80% (31.7V, 6340rpm, 33.5mph)
Right Side APS 6374-170:
Current Limit: 72% (86A, 4.9Nm, 48lbf)
Voltage Limit: 93% (36.8V, 6260rpm, 33.1mph)
This makes it a bit higher torque than tinyKart's ever seen before. Closing in on 100lbf of traction, which is about 0.5g, depending on driver weight (certainly in Zack's case...). After the Friday evening test session things are still holding together. No apparently movement of the rotor can on the Alien Power System motor and the keyway seems to be working well. The EMP motor shaft is also still hanging in there, apparently.
I couldn't really feel much of a difference with the slightly higher torque settings. It could be that the throttle control program running on the Arduino that is taped to the back of the seat is starting to limit the current. There's a filter built in to it to clean up and smooth out the RC car trigger analog input. I'll have to dig into the code and see what the filter settings are. It would also be useful to get some kind of AC current reading on the motors to know if they are actually hitting the Kelly controller current limits.
So far the Alien Power System motor seems like a win. If (when) the custom shaft on the EMP motor breaks, I will install a second Alien motor. At that point, with matched motors and keyed shafts on both sides, and with the high-speed Kelly firmware, the current and torque should be able to go up to 100%...and then we find the next weakest link.
This makes it a bit higher torque than tinyKart's ever seen before. Closing in on 100lbf of traction, which is about 0.5g, depending on driver weight (certainly in Zack's case...). After the Friday evening test session things are still holding together. No apparently movement of the rotor can on the Alien Power System motor and the keyway seems to be working well. The EMP motor shaft is also still hanging in there, apparently.
I couldn't really feel much of a difference with the slightly higher torque settings. It could be that the throttle control program running on the Arduino that is taped to the back of the seat is starting to limit the current. There's a filter built in to it to clean up and smooth out the RC car trigger analog input. I'll have to dig into the code and see what the filter settings are. It would also be useful to get some kind of AC current reading on the motors to know if they are actually hitting the Kelly controller current limits.
So far the Alien Power System motor seems like a win. If (when) the custom shaft on the EMP motor breaks, I will install a second Alien motor. At that point, with matched motors and keyed shafts on both sides, and with the high-speed Kelly firmware, the current and torque should be able to go up to 100%...and then we find the next weakest link.













{kind=link}
{kind=link}