But first, some new fuses:
 |
| Mini ANL (a.k.a. MIDI) fuses! |
Up until now, I've used only a single 100A fuse on the battery input side, limiting the battery current using the Kelly controllers. But this restricts the acceleration at high speeds (combination of high motor current and high PWM duty cycle). So I got some of these colorful MIDI fuses with ratings up to 150A. This fuse style, although only rated to 32V, has one of the best current-to-size ratios available for small vehicles. tinyKart's battery is 40V, so I'm pushing their rating a little bit, but I've at least seen them blow before when I reversed a Kelly controller input line and have some confidence that they will clear enough space to not arc over. It's hard to find fuses with intermediate voltage ratings (above automotive voltages, but below line voltages), so these will have to do.
Armed with new fuses, I did a new 50m test. 50m standing-start is a standard I got from the e-Kart competition, an electric go-kart challenge based in France. It's like a 1/4-mile drag race but scaled to a relevant distance for go-karts. Typical times are anywhere from 4-7s. There are some runs at the start of this video that I took when I visited the competition in 2009:
tinyKart has previously done a timed 50m run in 6.5s at the 2012 2.007 EV Section event. Even back then it was reaching top speed (right around 30mph) well before the end of the run. So, the total time is made up of one part constant acceleration and one part constant velocity. The top speed hasn't changed much with tinyKart: Black edition. It might have gained a tiny bit since there's no need to derate the Kelly controllers with high speed firmware. But the batteries and motor back-EMF constant haven't changed.
So most of the gians are in acceleration. In the previous run, both sides were limited to 80% current in order to keep the KBS36100 non-high-speed Kelly controllers happy. Now with 120A and 100% available (higher PWM frequency, less current ripple, no need to leave a margin), the acceleration is significantly increased, approaching 0.5g with an average-weight driver, I believe. The new 50m time, as a result, is down to 5.95s.
At 0.5g, top speed (assuming 31mph) is reached in 2.83s. So most of the time is spent at cruising speed. This suggests there could be some optimization in terms of gear ratio to improve the time even more, but I don't really care about it other than on a relative scale to see how the new components are doing.
The next test to redo was input power, measured using dual in-line Watt meters. Dual because they are only rated for 130A and I expected to be a bit over that. Also, one for each Kelly controller lets me compare the two motors. (Yes, it also might give a slightly higher than true reading, since they are peak-recording devices and the two sides might not reach peak power at exactly the same time.) Anyway, the test is simple: floor it and see what the peak powers are.
Previously, the highest recorded by tinyKart was 4.1kW during a garage climb run. Now, on level ground, it hit a peak of 4.76kW, with an evenly-matched and dubiously synchronous 2.38kW per side:

It's not proportionally higher based on peak current, but that's probably explained by several factors:
- This test was on level ground. The previous one was going up hill. Theoretically it shouldn't matter - current control is current control. But if there is any ramping / slew rate limiting on the throttle (there for sure is) or a mostly-integral current control method (on the Kelly controller), it makes a difference.
- Similarly, higher acceleration will cause an integral current controller to be chasing a moving target, so it will never quite reach full current. The faster the acceleration, the more the steady-state error. I have the current control at its fastest setting in the Kelly controller, but it's uncertain how fast that actually is.
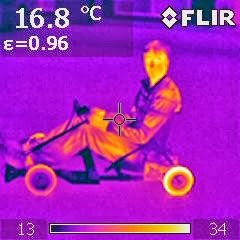
- The batteries are starting to show their age. The per-cell internal resistance seems to be at about 10-11mΩ now, compared to 6mΩ for new M1-B cells. One pack (not the one used for this test) also has a particularly bad cell group, as confirmed by the thermal camera:
Even the good pack is showing a bit more voltage sag though, which limits the peak power.
Luckily, it's the end cell group, so it should be easy to repair. - As is often the case in Seattle, the ground was a bit damp and leafy. After a few minutes of testing, it became impossible to get any more peak power readings:

I'm pretty sure the previous iteration could not do this quite as dramatically.
4.75kW input should equate to something like 4.15kW output measured at the motor shaft, assuming approximately 100A per motor at peak power and a motor resistance of around 29mΩ. This is ignoring speed-dependent losses, both in the motor and in the belt drive and tires. The actual maximum power reaching the ground leaves could be somewhere in the 3.5-4.0kW range, depending on all those things.
In any case, I'm not one to try cramming even more power into tinyKart. It's already doing more than it was designed for by a good margin, and the power feels perfect for its size and handling. So I will probably just replace the bad cells in the battery pack, prep a second Alien Power Systems motor as a back-up for the EMP, put on the snow tires, and prepare for winter.
In any case, I'm not one to try cramming even more power into tinyKart. It's already doing more than it was designed for by a good margin, and the power feels perfect for its size and handling. So I will probably just replace the bad cells in the battery pack, prep a second Alien Power Systems motor as a back-up for the EMP, put on the snow tires, and prepare for winter.