
1. Stator and rotor. Δt1
2. Deck fabrication. Δt2
3. Batteries. Δt2
4. Wind motor.
5. Motor-to-wheel adapter fabrication. Δt3
6. Optical encoder.
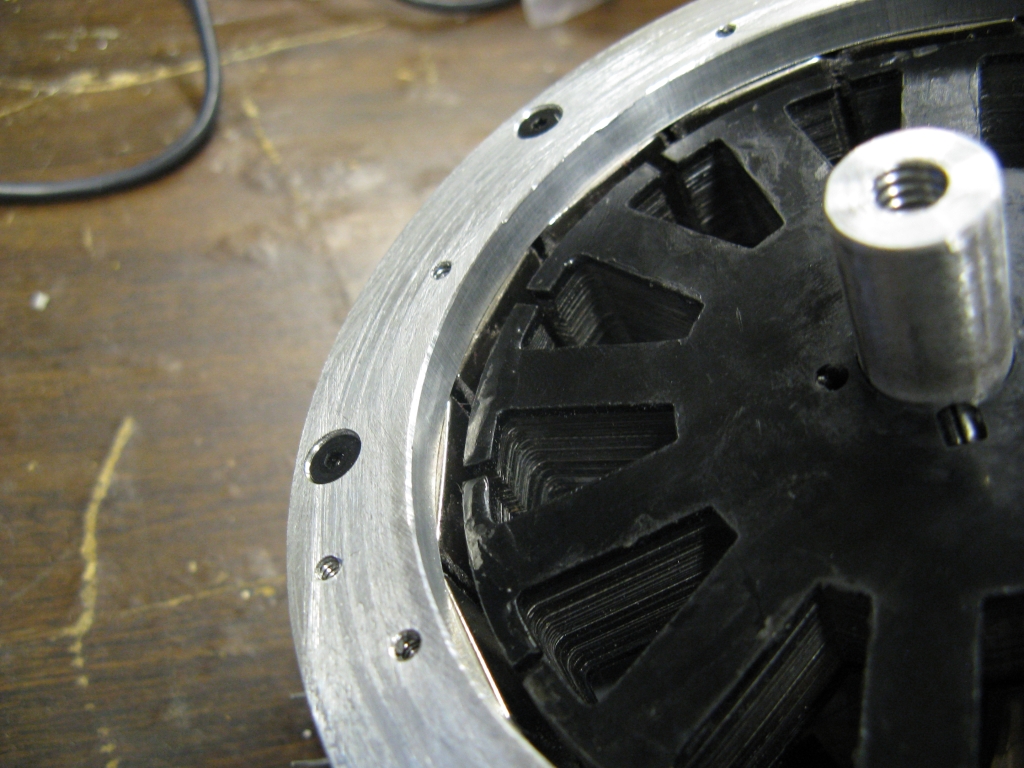
Another weekend scooter party at MITERS, another large task taken out. I decided to skip over the motor winding and instead tackle the most critical part of the pneumatic wheel hub motor: an aluminum adapter that joins the BWD-profile rotor can to the plastic rim of the pneumatic caster. This part:

The reason I identify this as the most critical part is because, against my better instincts, I am relying on the plastic wheel hub as an integral part of the motor's structural loop. It takes the place of what would normally be a carefully machined aluminum or polycarbonate side wall, and I have to live with both its relative elasticity and its imperfect geometry. The good news is that it has very nice bearing pockets already and a flat, thick rim. The aluminum part in focus reinforces the rim and aligns the rotor so that it's concentric with the bearing pockets in the wheel hub.
Unfortunately, this thin part has an inner/outer diameter combination (4.625", 3.313") that didnt' match up with any tubular aluminum stock, so I used a solid 5" diameter chunk of 6061, which is certainly the biggest stock I've ever started from...

Before and after.
Needless to say, this was not the quickest operation ever. From that chunk of aluminum I also made the outer rotor spacer, which is almost a mirror of the rim adapter. Here they are together, before adding bolt patterns:

The outer rotor spacer (right) has one less "step" than the rim adapter (left) because it clears the stator entirely, which is good because it means I can drop the stator in and spin it without actually removing any of the parts that hold the rotor to the wheel, something I'll get to later. But first, lots and lots of bolt holes.

First, in the wheel itself. I made a multipurpose mill fixture out of the leftover scooter deck u-channel. The part to be machined is screwed into the u-channel from below. Here, the wheel gets a pattern of seven 4-40 tapped holes, centered on the bearing pocket's ID. The thick rim allowed several full threads, which is good.

Next, the matching countersunk hole pattern, as well as another set of seven tapped 4-40 holes for the rotor can, went into the rim adapter:

And when the aluminum chips settle, the rim adapter and real bearings make the kinda lame caster wheel look like something a lot more respectable:

The rim adapter actually isn't in the load path from the tire to the shaft; that load goes straight into the two wheel bearings. Instead, this part is only responsible for aligning and holding the rotor in place over the stator, which is fixed to the shaft that passes through the wheel bearings. So, I'm not worried about the 4-40's getting ripped out of the plastic or anything. I'm more worried about concentricity and bolt pattern alignment. The wheel hub itself is not perfect, though, and the stator stack is very skewed, as I'll mention later, so I probably didn't have to obsess about this part as much as I did. But whatever, it's still cool.
With the rotor and (still blank) outside rotor spacer, the assembly looks like this:

The outside rotor spacer's inner diameter is just about tangential with the flat spot of the magnets, which means it easily clears the stator. This is a very nice feature because it means that I can add the seven bolts that hold the rotor to the rim adapter before dropping the stator in. And, because the wheel already has two bearings, the stator should be fully supported without the eventual outside bearing plate. This is extremely convenient, as you will see shortly. But first, the rotor and stator together for the first time:

After the satisfying snap of the stator being sucked in by the magnets, I was very pleased to find that it did in fact spin freely with no outside bearing. I'll still add the outside plate and bearing for weatherproofing, but this gives me confidence that the plate is non-structural (or at most semi-structural...) and can be made thinner to accommodate more windings if necessary.
While the rotor has a little bit of wobble due to the imperfection of the wheel hub itself, it's nothing compared to the major skew in the stator stack. And not the good kind of skew...this is the kind that closes the air gap on one side of the motor...

...and opens it on the other...
The stack must have been poorly fixtured during the gluing phase. It's not quite as bad as it looks, since the inner layers of laminations have almost the opposite skew. But there is still a net asymmetry that has me worried, and unfortunately I am just a few laminations short of being able to produce another stack. I think it will still work, since BWD's extra-thick magnet design is supposed to absorb exactly these kinds of manufacturing errors.
{kind=link}
I know! Since the motor is well-supported without the outside bearing, I have temporary direct access to the stator... Why not put on a test winding?

Here is the motor with three test windings: one on the "wide" air gap side, one on the "narrow" air gap side, and one in the middle. Each winding is 80 turns on two adjacent teeth (40 per teeth), which represents a single phase of the motor. Two such windings on opposite sides of the motor would be wired in parallel for the final configuration. I used very small gauge wire here since it's only for no-load back EMF measurement. And yes, the wheel is being driven by that lathe while the stator and shaft are fixed in the drill chuck...
The result was only about a 5% difference in generated voltage due to the skewed stator. The projected torque constant is pretty much on target at 0.191Nm/A for the narrow gap side and 0.183Nm/A for the wide gap side. Wiring the two opposing sides in parallel will create some current flow and I²R loss because of the different constants. But, taking into account the operating voltage and estimated resistance, this should be a small (<1W) power drain at worst. So, I should stop worrying and just wind it already.
No comments:
Post a Comment