
1. Stator and rotor. Δt1
2. Deck fabrication. Δt2
3. Batteries. Δt2
4. Wind motor. Δt4
5. Motor-to-wheel adapter fabrication. Δt3
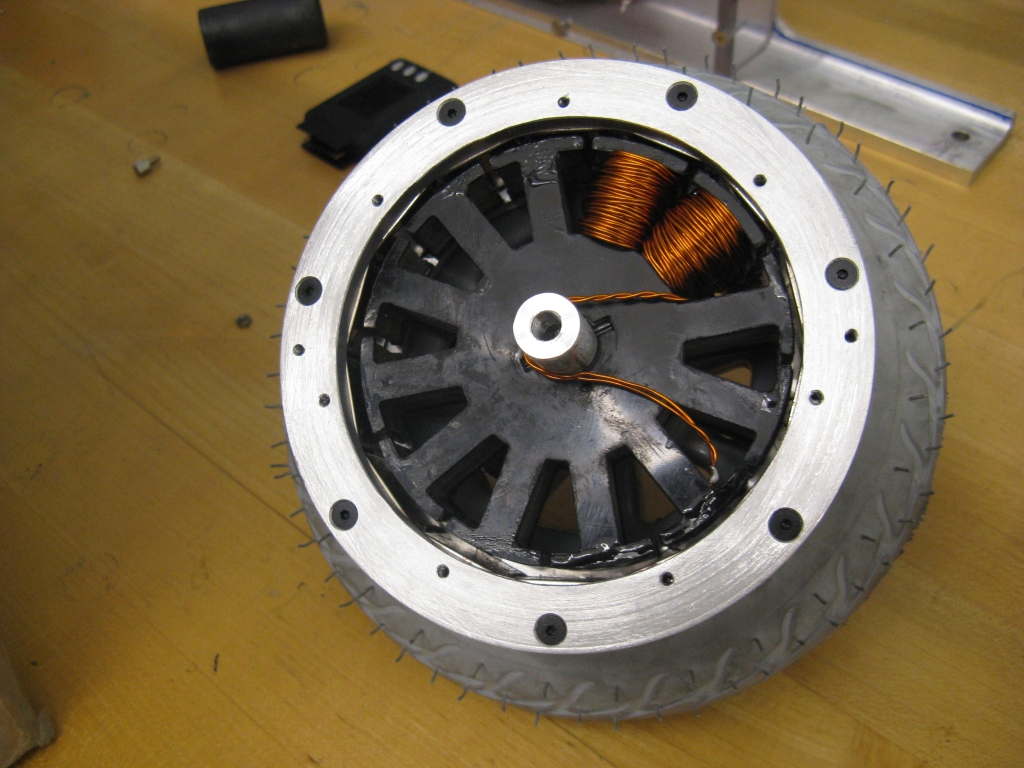
6. Yes, all the large tasks are done. No, you can't ride it yet. There are still a large number of small tasks to be accomplished, such as mounting the front wheel, adding connector and wires, and tweaking/tuning the controller. But I did make some progress. First, I terminated the motor:

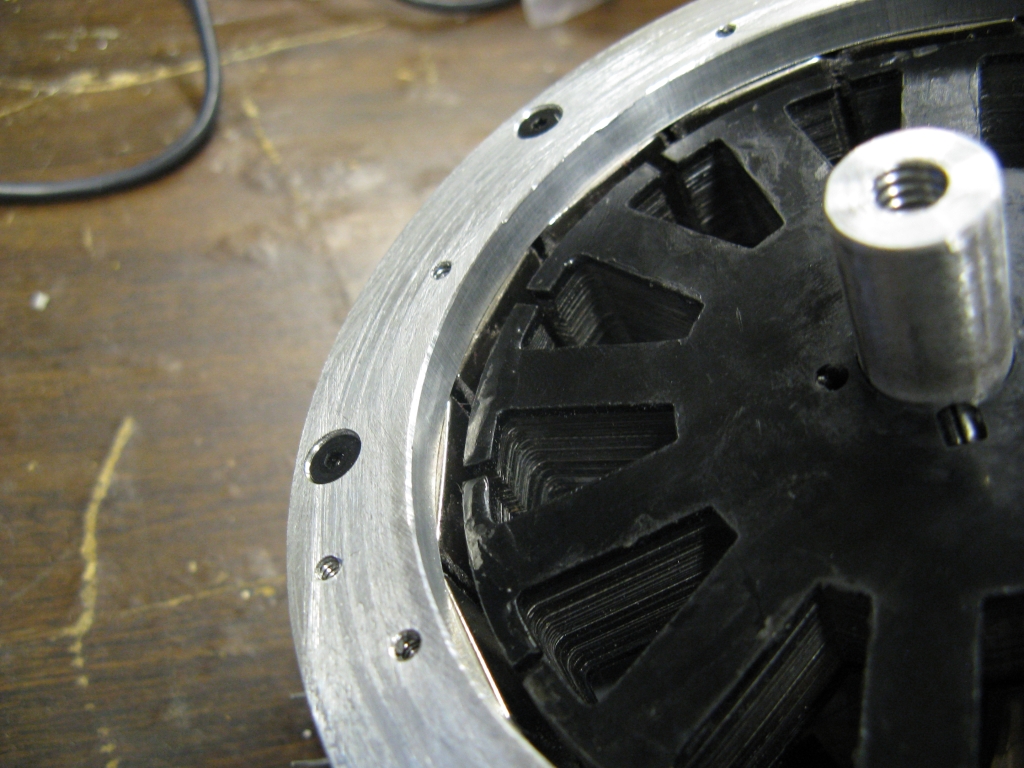
It's a "distributed LRK" winding, but split into two half-motors [AabBCc] and [aABbcC] on opposite sides of the stator. Connecting the two half-motors in parallel and running wires out through the center shaft completes the winding of the stator.
Next, a part that wasn't really on the "large tasks" list but is still fairly important: the motor end cap. Since the end cap is not part of the load path from wheel to deck, it wasn't as critical as the wheel adapter. And the motor would spin fine without it thanks to the two wheel bearings. But I thought it would be good to just get it done so that the motor itself is a completed unit.
I went with the trademark transparent polycarbonate sides of the BWD motors, but added a chamfer to the edge (the way Max originally drew it...sorry Max). Also, a trick I learned from BWD: using a large screw and nut as a lathe fixture:

Nuts have six sides. Lathes have three jaws. Commence happiness.
Moments later, this:


I still needed a commutation encoder, though. I decided against internal Hall effect sensors and was geared up to pursue a reflective optical track with IR sensors. I even printed out a set of tracks and laminated it. But then I had second thoughts. Such an encoder would be sensitive to changes in ambient light, dirt, water droplets, all things I'm likely to encounter. Hall effect sensors are nice because they are immune to most of that. But internal Hall effect sensors are impossible to adjust without disassembling the motor, and also they may interact with stator flux. As an encoder of absolute rotor position, the sensor should be picking up rotor flux only. (In a PM motor like this, the difference might be minor.)
BWD used external Hall effect sensors, mostly because we didn't know any better. But they actually turned out to work very well, picking up the fringing field from the huge, overhanging rotor magnets through the polycarbonate end caps. This time, though, the magnets don't overhang very far and the field on the outside of the rotor is not enough to reliably trip the sensors. Somewhere on this train of thought I was browsing on McMaster and stumbled on P/N 3651K4, a flexible magnet strip that's sort-of like an industrial refrigerator magnet. I wound up just cutting this strip into 14 equally-spaced pieces and gluing them to the outside of the rotor can.

The companion for this sense magnet strip is an external Hall effect sensor board, which I made from convenient polycarbonate:



To be continued.....














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}