
 |
| Colony ship #11 or #12 - I lost count. Parked at Minmus for a front row seat to the end of the world. |
By this point I was getting pretty tired of building colony ships. Each one takes about a dozen launches to assemble, crew, and fuel in low Kerbin orbit. But I managed to get two more built and parked at Minmus. I also realized that there would be a little bit of a housing shortage on Laythe with the extra 72 Kerbals these colony ships carry, so I sent up one more HAB1 transfer ship as well. But parking ships in Minmus orbit isn't exactly efficient, and I am running a pretty tight Δv budget. A perfect opportunity, then, to create one last piece of hardware for this mission.
The Drop Ships
 |
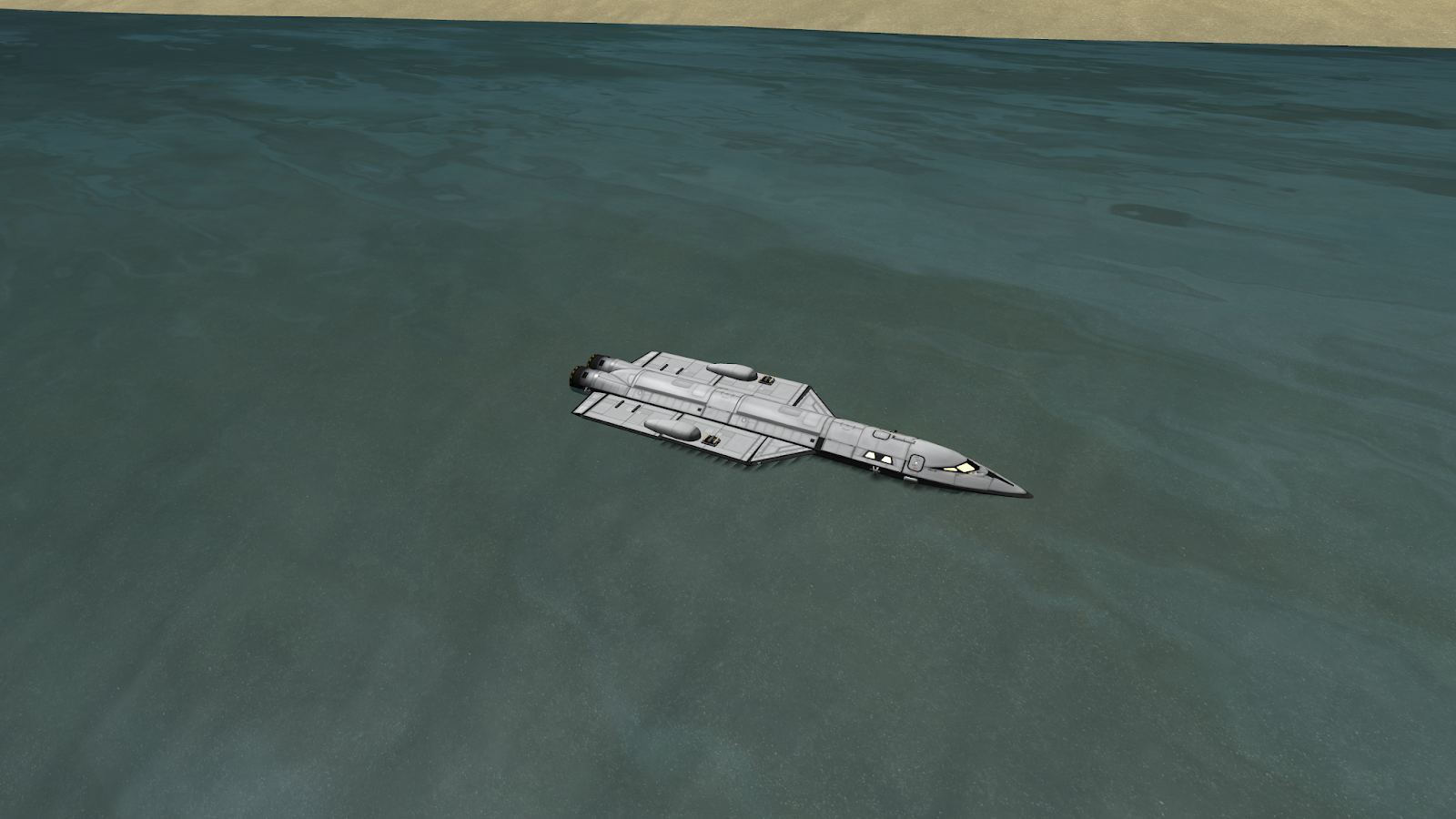
| The DS1 lander, a last-minute mining platform and fuel tanker for the fleet. |
Until now, the only ships in my fleet with mining capabilities were the LR1 rovers, which can refuel space planes on the surface of Laythe. The planes can then climb into Laythe orbit and transfer any spare fuel to the colony ships. But it would take quite a few launches to fully refuel the colony ships this way. Better to mine on a moon with a shallow gravity well, like Pol, and net a bunch more fuel. So I designed a drop ship mining platform/tanker to do just that. Refueling the ships parked at Minmus before the third Jool transfer window would be a good test.
I've done space planes and straightforward powered descent, but never a true VTOL in the sense of a ship that is designed to hover and translate horizontally looking for flat ground or good mining prospects. Most of my knowledge about drop ships comes from watching Cupcake Landers videos. I just tried to make it symmetric, place the C.G. properly, and set up the fuel tanks so that the C.G. doesn't shift much as they drain.
 |
| Drop ship mining practice on Minmus. |
Even though they're essentially flying fuel tanks, cruising through mountain ranges in the low gravity of Minmus in them is easy and actually kind-of fun. Normally I'm trying to time suicide burns just right or not stall out my space planes, both of which are more stressful technical tasks. Piloting a drop ship is closer to a sci-fi landing experience. Which reminds me: if you're looking for a quick diversion from the brutally technical challenge of KSP, Outer Wilds is a beautiful (and creepy) exploration/mystery game with some incredible open-world storytelling. Absolutely worth going in blind and playing through.
Back to Minmus mining, though. I only had time to build two of these drop ships. They can operate autonomously, but they also have room for a pilot, for navigation in frontier areas with poor relay coverage, and an engineer, for more efficient mining. I realized while building these final few ships that I neglected to put relay antennas on the colony ships, something that is required for remote piloting rovers, space planes, or drop ships. Since I might need to do a lot of remote piloting in the Jool system, I decided to steal a couple relay satellites from Kerbin orbit.
Back to Minmus mining, though. I only had time to build two of these drop ships. They can operate autonomously, but they also have room for a pilot, for navigation in frontier areas with poor relay coverage, and an engineer, for more efficient mining. I realized while building these final few ships that I neglected to put relay antennas on the colony ships, something that is required for remote piloting rovers, space planes, or drop ships. Since I might need to do a lot of remote piloting in the Jool system, I decided to steal a couple relay satellites from Kerbin orbit.
 |
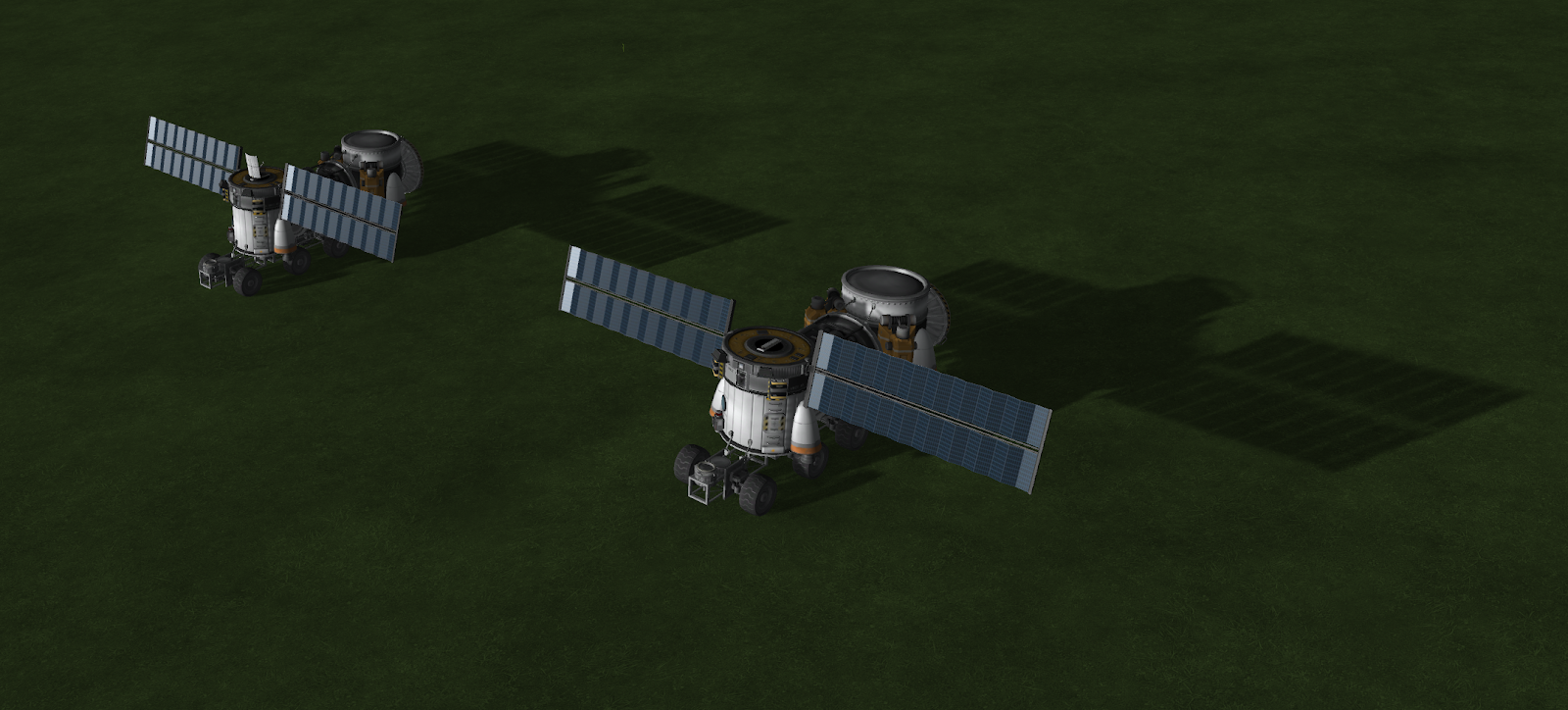
| Stealing a satellite with the grabby claw I knew would come in handy. |
Once these ships leave Kerbin orbit, there won't be any need for a Kerbin comms network anymore, so I (literally) grabbed some of Kerbin's relay satellites with the last two colony ships. It is possible to create a remote piloting connection through a relay satellite in a grabby claw, something I find satisfyingly appropriate for Kerbal-style mission "planning". Anyway, I made a few round trips to Minmus surface to refuel the ships of the third wave and then that was it for Kerbin.
0 Days Remain
On Year 3, Day 0, time was up for the Kerbal home planet. The remaining population (of 432 Kerbals) was in flight, either on the way to Jool or at Minmus awaiting the third transfer window. No more hardware would be launched and the roughly four kilotons of ship and propellant in the fleet would have to become the Laythe colony. But it would still be almost another two years before the first colony ship arrives in the Jool system. Before that, the robotic fleet would have to lay the groundwork.
The Lonely Rovers
The 18 ships of the first Jool launch window arrived at their destination during the second half of Year 3. I set up the transfers such that the relay satellites would arrive first, since having a working comms net in the Jool system would be crucial to the rest of the mission. The RS3 ships and especially the ion engine satellites themselves have plenty of Δv to spare, so I just brute-forced them into useful coverage orbits around Jool and Laythe.
 |
| The first relay satellites arrive at Jool. I'm definitely guilty of setting up the WiFi before unpacking... |
For the remainder of the ships, though, the Δv budget was tight enough that I definitely wanted to grab Tylo gravity assists on the way in. This created a bit of traffic as several ships would hit the Tylo gateway within days, or sometimes hours, of each other. To get captured using a gravity assist, I aimed to pass "in front of" Tylo, so that its gravity mostly pulls in a direction opposite my orbit and I feed it some of my kinetic energy. After some refinement, I also was able to target a captured orbit with a periapsis similar to the orbital radius of Laythe. From there, it's easy to get a low-energy intercept on the next orbit with just a couple small correction burns at periapsis and apoapsis.
 |
| Busy airspace (or, spacespace?) around the Tylo gateway. |
Using gravity assist captures off Tylo, or in a few cases off Laythe itself, my average Δv from low Kerbin orbit to low Laythe orbit was about 3475m/s, with a tolerance of about ±350m/s. This is quite a bit below the 4360m/s you get from the subway map, which would have been cutting it very close for some of my ships. As it is, all of the robotic fleet made it to low Kerbin orbit with fuel to spare and without having to do any aerobraking. Assuming all the Δv saved went into accelerating Tylo (and it wasn't on rails), its apoapsis would be raised by about 1nm.
Getting to Laythe is not the same as landing on Laythe, though. It's a water world with only a few islands to target. I've landed there before, using a custom deorbit burn tool to target the island on the equator with the flattest terrain. To hit that island, it makes sense to burn over the small island that's about 90º west of there. I set up each ship in a near-circular 100km equatorial orbit and then start a burn just as the ship passes over the coast of that island:
Getting to Laythe is not the same as landing on Laythe, though. It's a water world with only a few islands to target. I've landed there before, using a custom deorbit burn tool to target the island on the equator with the flattest terrain. To hit that island, it makes sense to burn over the small island that's about 90º west of there. I set up each ship in a near-circular 100km equatorial orbit and then start a burn just as the ship passes over the coast of that island:
 |
| Laythe deorbit burn over the small island on the equator, to hit the flat island about 90º to the east. |
After the burn, the lander can ditch its propulsion module (which is mostly empty now and will burn up separately) and prep for entry. For the first phase of the landing, an inflatable heat shield protects the descent package from the initial atmospheric heating.
 |
| Landing Phase 1: Using an inflatable heat shield to protect the payload while bleeding off some speed. |
As the air gets thicker, the drag on the heat shield overcomes the ability of the reaction wheels to keep it facing forward, so the lander flips around. The fairing still provides thermal and aerodynamic protection for the payload, and the heat shield now becomes more of an air brake, bleeding off even more speed in preparation for the final descent.
 |
| Landing Phase 2: The craft flips around, with the heat shield now acting as an air brake. |
At about 3km AGL, the speed is low enough to jettison the fairing and deploy the main parachutes. The heat shield stays attached until the main chutes deploy, at which point it can be jettisoned in a controlled orientation so it doesn't crash back into the ship.
 |
| Landing Phase 3: Fairing jettisoned, main chutes deployed, heat shield dropped. |
Finally, at about 300m AGL, the descent engines kick in and bleed off the final bit of vertical velocity. They don't have much fuel, so the burn has to be timed pretty well. I use the AeroGUI's AGL indicator and the lander's shadow to judge it.
 |
| Landing Phase 4: Powered descent. Kicks up a good amount of sand. |
That's how things should go. But the first two landings were not quite perfect. I nearly overshot the landing zone on the first try, coming down less than 1km from the eastern shore. This is almost exactly where I landed my first Laythe mission, and I knew it was on a major slope. In the process of preparing for a potentially harrowing post-landing slide into the ocean, I forgot a few steps of the landing checklist and the descent engines didn't start up. The resulting ~15m/s impact was enough to break off the mining rig and fuel tank from the first LR1 rover down. But the drivetrain survived, so it could still act as a scout if it could get up the hill.
 |
| The first (hard) landing on Laythe in this mission, dangerously close to the shore. |
Having nearly overshot the landing zone into the ocean, I tweaked the deorbit burn a little (from 104m/s to 110m/s). However, this was a little too much tweaking and lander #2 wound up heading straight for the lake in the middle of this island. Luckily, this was a HAB1 lander, which has a little more fuel on board for the powered final descent. I managed to just barely hover-translate to the cliff edge overlooking the lake's eastern shore with no fuel to spare.
 |
| Landing #2 involved some last-second piloting to steer away from the lake to the edge of a cliff. |
Those two landings gave me the upper and lower limits for the deorbit burn. I used 108m/s as the burn for the remaining 12 landers, and they all touched down safely on the relatively flat land between the lake and the eastern shore.
 |
| Typical landing zone after dialing in the exact deorbit burn. |
I say relatively flat because it's still filled with sand dunes. They're no problem for the 6- and 8-wheeled rovers, but I need a 1-2km stretch of actually flat terrain to use as a space plane runway. I scouted for a while before settling on the strip marked out by the pink markers in the landing photo above. It's about 1.5km long and 300m wide, near the equator, and aligned well for west-to-east landings. It's completely flat in the crosswind direction and slightly sloped upward in the "upwind" landing direction. I'd prefer something flat in all directions, but this is the next best thing.
By the end of the first wave, I could place the landers with about ±2km accuracy from orbit. But they are rovers, so it's easy to reposition them as needed. The LR1s all grouped together to form the corners of the runway, acting as visible markers for the space planes on approach. They're needed at the runway for refueling anyway, so this seems like the best place for them. In order to avoid excessive part counts in one location, I decided to move the HAB1s, the colony habitats, away from the runway and toward the lake. There, they could be assembled into housing groups.
By the end of the first wave, I could place the landers with about ±2km accuracy from orbit. But they are rovers, so it's easy to reposition them as needed. The LR1s all grouped together to form the corners of the runway, acting as visible markers for the space planes on approach. They're needed at the runway for refueling anyway, so this seems like the best place for them. In order to avoid excessive part counts in one location, I decided to move the HAB1s, the colony habitats, away from the runway and toward the lake. There, they could be assembled into housing groups.
 |
| Setting up some modular housing on the dunes. |
It's not a metropolis, but having a mobile and reconfigurable colony seems ideal on the sand dunes of an otherwise pretty desolate water planet. In total, 13.5 of the 14 rovers in the robotic fleet made it to the surface, and all 14 were able to find their way to each other and remotely set up the infrastructure for a colony. It'll be another year before the colony ships arrive in the second wave, but when they do, they'll have a place to stay - with a nice view.
 |


























{kind=link}